Audio for VR/AR is getting a lot of attention these days, now that people are realising how essential good spatial audio is for an immersive experience. But we still don’t have as many tools as are available for stereo. Not even close!
This is because Ambisonics has to handled carefully when processing in order to keep the correct spatial effect – even a small phase change between channels significantly alter the spatial effect – so there are very few plugins that can be used after the sound has been encoded.
To avoid this problem we can apply effects and processing before spatial encoding, but then we are restricted in what we can do and how we can place it. It is also not an option if you are using an Ambisonics microphone (such as the SoundField, Tetra Mic or AMBEO VR), because it is already encoded! We need to be able to process Ambisonics channels directly without destroying the spatial effect.
So, what is missing from your 3D sound toolbox? Is there a plugin that you would reach for in stereo that doesn’t exist for spatial audio? Maybe you want to take advantage of the additional spatial dimensions but don’t have a tool to help you do that. Whatever you need, I am interested in hearing about it. I have a number of plugins that will be available soon that will fulfil some technical and creative requirements, but there can always be more! In fact, I’ve already released the first one for free. I am particularly interested in creative tools that would be applied after encoding but before decoding.
With that in mind, I am asking what you would like to see that doesn’t exist. If you are the first person to suggest an idea (either via the form or in the comments) and I am able to make it into a plugin then you’ll get a free copy! There is plenty of work to do to get spatial audio tools to the level of stereo but, with your help, I want to make a start.
This post is part of my What Is… series that explains spatial audio techniques and terminology.
OK, you know what stereo is. Everyone knows what stereo is. So why bother writing about it? Well, because it allows us to introduce some links between the reproduction system and spatial perception before moving on to systems which use much more than 2 loudspeakers.
Before going any further, this post will deal with amplitude panning. Time panning will be left for another day. I also won’t be covering stereo microphone recording techniques because that could fill up its own series of posts.
The Playback Setup
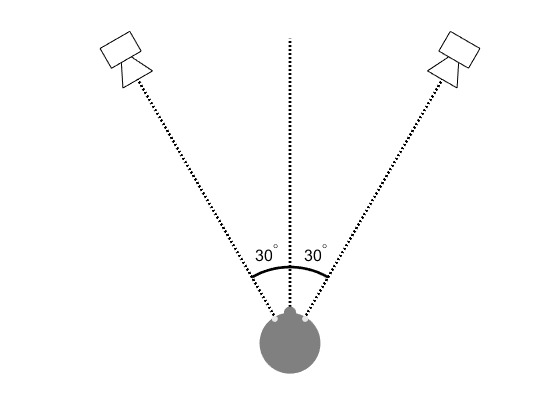
A standard stereo setup is two loudspeakers placed symmetrically at (pm30^{circ}) to the left and right of the listener. We will assume for now that there is only a single listener equidistant from both loudspeakers. The loudspeaker basis angle can be wider or narrower but if they get too wide there is a hole-in-the-middle problem. Too narrow and we reduce the range of positions at which the source can be placed. Placing the loudspeakers at (pm30^{circ}) gives a good compromise between these two, balancing sound image quality with potential soundstage width.
A standard stereo listening arrangement.The tangent law prediction of perceived source angle for different level differences
Placing the Sound
Amplitude panning takes a mono signal and sends copies to the two output channels with (potentially) different levels. When played back over two loudspeakers the level difference between the two channels controls the perceived direction of the sound source. With amplitude panning the perceived image will remain between the loudspeakers. If we know the level difference between the two channels then we can predict the perceived direction using a panning law. The two most famous of these are the tangent law and the sine law. The tangent law is defined as begin{equation} frac{tantheta}{tantheta_{0}} = frac{G_{L} – G_{R}}{G_{L} + G_{R}} end{equation} where (theta) is the source direction, (theta_0) is the angle between either loudspeaker and the front (30 degrees in the case illustrated above) and (G_{L}) and (G_{R}) are the linear gains of the left and right loudspeakers.
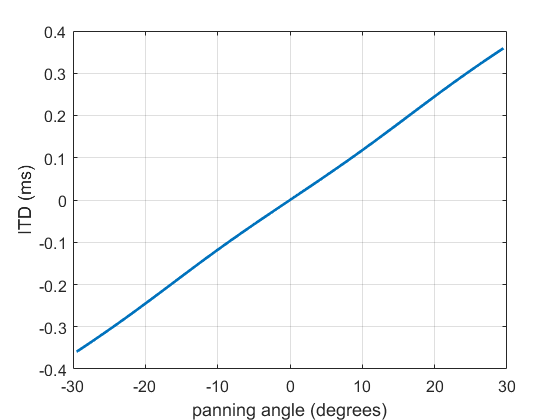
The ITD produced for a source panned with loudspeaker level differences generated by the tangent law.
How It Works
Despite being simple conceptually and very common, the psychoacoustics of stereo are actually quite complex. We’ll stick to discussing how it relates to the main spatial hearing cues.
As long as both loudspeakers are active, signals from both loudspeakers will reach both ears. Due to the layout symmetry, both ears receive signals at the same time but with different intensities corresponding to the level differences of the loudspeakers. Furthermore, since it has further to travel, the signal from the left loudspeaker will reach the right ear slightly later than the signal from the right loudspeaker. The opposite is true for the right ear. This time difference combined with the intensity difference gives rise to interference that generates phase differences at the ears. These phase differences are interpreted as time differences, moving the sound between the loudspeakers.
The ITD (below 1400 Hz) is shown in the figure and is roughly linear with panning angle. This is pretty close to exactly what we see for a real sound source moving between these angles. This works pretty well for loudspeakers at (pm30^{circ}) or less, but once the angle gets bigger the relationship becomes slightly less linear.
These strong, predictable ITD cues mean that any sound source with a decent amount of low frequency information will allow us to place the image pretty precisely. Content in higher frequency ranges won’t necessarily be in the same direction as long frequency content because ILD becomes the main cue.
Even though stereo gives rise to interaural differences that similar to those of a real source, that does not mean it is a physically-based spatial audio system (like HOA and WFS). The aim is to produce a psychoacoustically plausible (or at least pleasing) sound scene. Psychoacoustically-based spatial audio systems tend to use the loudspeakers available to fit some aim (precise image, broad source) without regards to if the resulting sound scene ressembles anything a real sound source would emit.
So, there you have a quick overview of stereo from a spatial audio perspective. There are other issues that will be cover later because they relate to other spatial audio techniques. For example, what if I’m not in the sweet spot? What if the speakers are to the side or I turn my head? What if I add a third (or forth or fifth) active loudspeaker? Why do some sounds panned to the centre sound elevated? All of these remaining and non-trivial points shows just how complex perception of even a simple spatial audio system can be.
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.